Iklan
Mobil yang dikendalikan dari jarak jauh memang menyenangkan, tentu saja mengemudi sendiri mobil robot bahkan lebih menyenangkan. Dalam tutorial ini, kami akan membangun robot roda empat yang dapat berkeliling dan menghindari rintangan. Saya membeli kit 4WD lengkap ini dari AliExpress, tetapi Anda dapat dengan mudah membeli sebagian besar komponen ini dari toko elektronik dan menggabungkannya sendiri.
Saya sarankan membaca semua instruksi sebelum Anda mulai, karena itu akan membuat beberapa hal menjadi jelas yang mungkin membingungkan pada kali pertama. Juga, ini mungkin terlihat seperti proyek yang sangat panjang dan maju karena lamanya instruksi, tetapi sebenarnya cukup sederhana. Tidak perlu diintimidasi - ini adalah proyek tingkat pemula yang bisa Anda dapatkan dengan hasil yang memuaskan, kemudian bangun saat Anda belajar lebih banyak. Tidak suka gaya robot ini? Ini beberapa lagi Robot Arduino 8 Robot Arduino yang Dapat Anda Bangun dengan harga kurang dari $ 125Arduino dapat melakukan banyak hal, tetapi tahukah Anda bahwa itu dapat membuat robot lengkap? Cukup murah juga! Baca lebih banyak Anda bisa dengan mudah membangun.
Inilah yang kami miliki, setelah mengeluarkan semuanya dari kemasan:

Untuk memulai, kami akan memasang motor dan jembatan H (kartu yang memberikan daya ke motor) ke bagian bawah sasis. Pertama, pasang empat braket logam (empat persegi panjang, blok logam yang dibor) pada setiap motor menggunakan dua baut panjang dan dua mur.
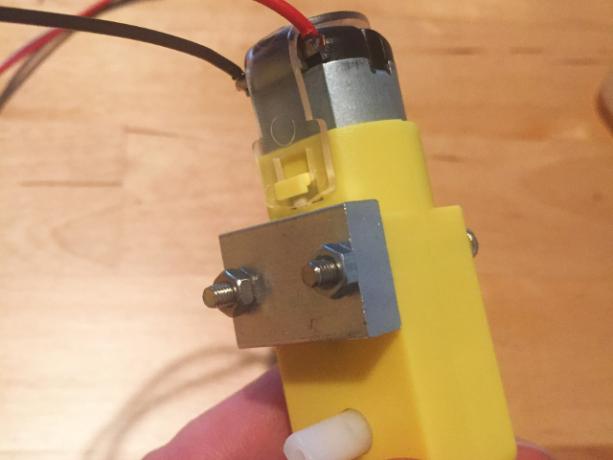
Anda harus memastikan bahwa mereka terpasang dengan benar, jadi lihat gambar di bawah untuk memastikan bahwa sisi blok dengan dua lubang bor akan menghadap ke bawah. Perhatikan bahwa kabel pada setiap motor mengarah ke tengah sasis.
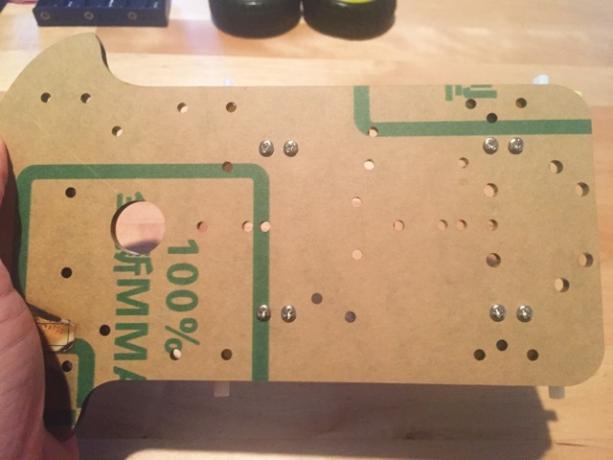
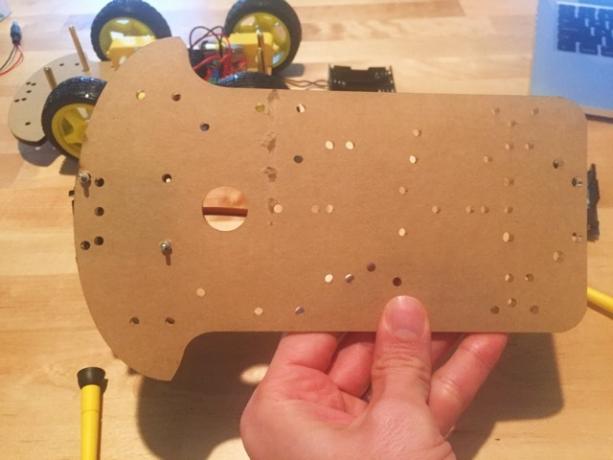
Sekarang setiap motor dapat dipasang ke sasis dengan menggunakan dua baut pendek di bagian bawah masing-masing braket logam. Inilah tampilan bagian bawah sasis sehingga Anda dapat melihat di mana baut harus berada:
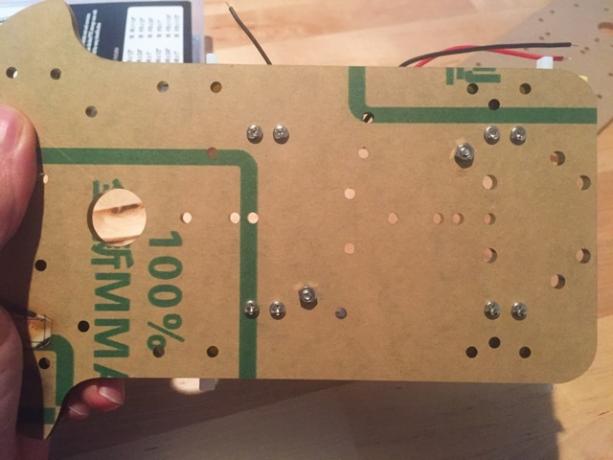
Langkah selanjutnya adalah mengamankan jembatan H (itulah papan merah, dalam kit saya) ke sasis. Anda mungkin ingin menunggu sampai semua kabel terpasang ke jembatan H sebelum melakukan ini, tetapi itu terserah Anda (saya merasa lebih mudah). Catatan singkat: kit saya tidak memiliki sejumlah pengencang, jadi saya menggunakan pita listrik untuk mengamankan jembatan. Namun, Anda dapat melihat di sini di mana baut dan mur akan pergi:
Sekarang setelah jembatan H telah terpasang, Anda dapat mulai memasang kabel catu daya. Karena dudukan baterai enam-AA dilengkapi dengan adaptor DC, Anda harus memotong ujungnya (yang saya lakukan) atau menjalankan kabel jumper ke baterai itu sendiri.

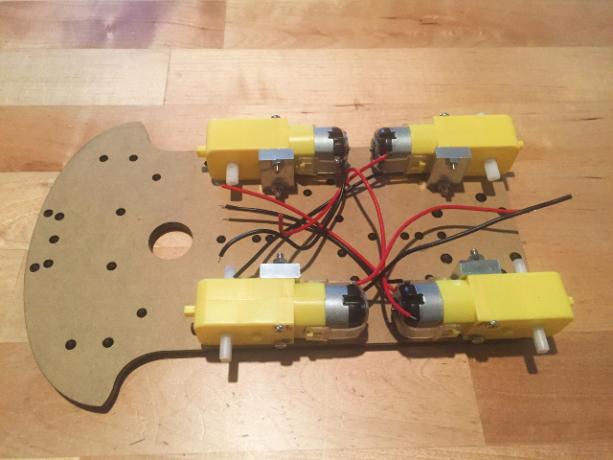
Tidak peduli bagaimana Anda memutuskan untuk melakukannya, Anda akan menjalankan kabel positif ke port berlabel "VMS" dan kabel negatif ke yang berlabel "GND" di jembatan. Jatuhkan pengencang dan pastikan aman. Kemudian, Anda akan menghubungkan kabel motor. Di kedua sisi, ada satu set dua port; satu diberi label "MOTORA" dan yang lainnya "MOTORB." Kedua kabel merah di setiap sisi akan masuk ke porta hijau paling tengah, dan kedua kabel hitam akan masuk ke bagian terluar. Gambar ini harus membuatnya lebih jelas:
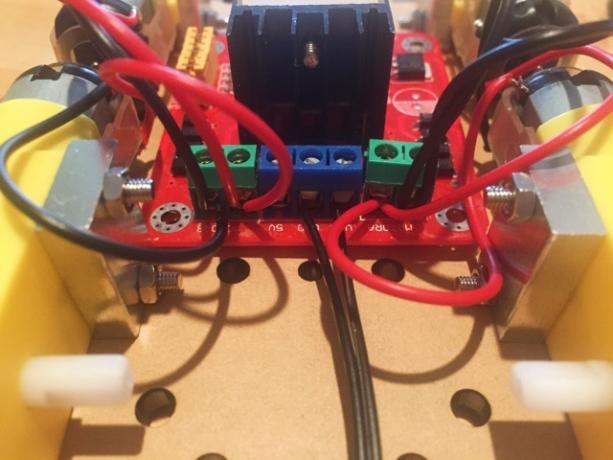
Saya menemukan bahwa saya harus menanggalkan beberapa perumahan dari kabel motor untuk mendapatkan ini berfungsi. Sekarang setelah Anda memiliki motor dan catu daya semua terhubung, geser roda ke poros penggerak motor, dan pasang empat poros tembaga di lokasi yang ditunjukkan pada gambar di bawah ini (setiap poros tembaga membutuhkan satu baut kecil). Robot ini mulai terbentuk!
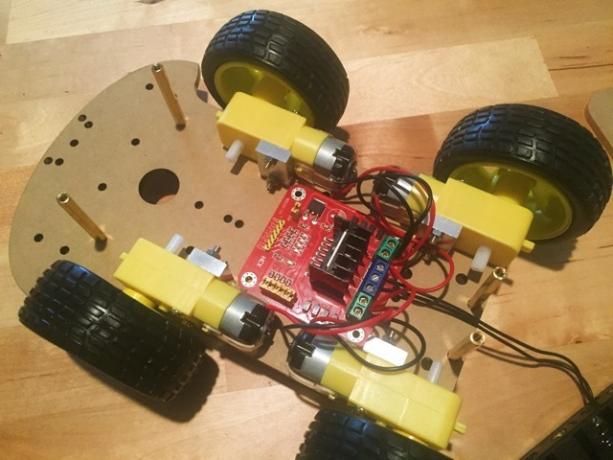
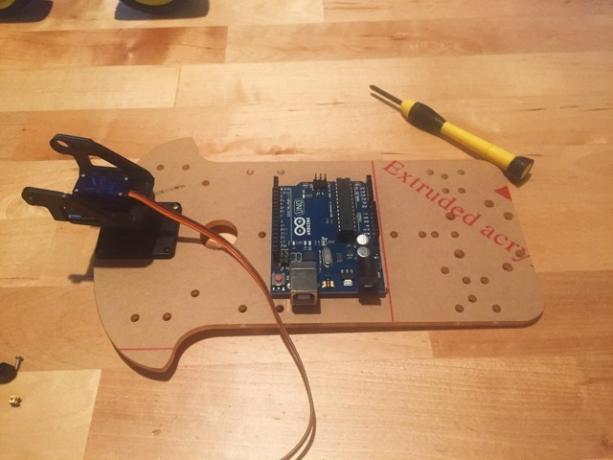
Sekarang, sisihkan bagian sasis itu dan ambil yang lain yang akan duduk di atas. Langkah selanjutnya adalah memasang Arduino — sekali lagi, saya harus menggunakan selotip listrik, tetapi Anda harus bisa mengamankan milik Anda dengan beberapa baut dan mur.

Langkah selanjutnya membutuhkan servo mikro, salib hitam, pegangan servo (yang terdiri dari tiga keping plastik hitam), dan beberapa sekrup kecil. Gunakan salah satu sekrup tajam yang lebih besar dalam kit untuk memasang crosspiece hitam ke micro servo:
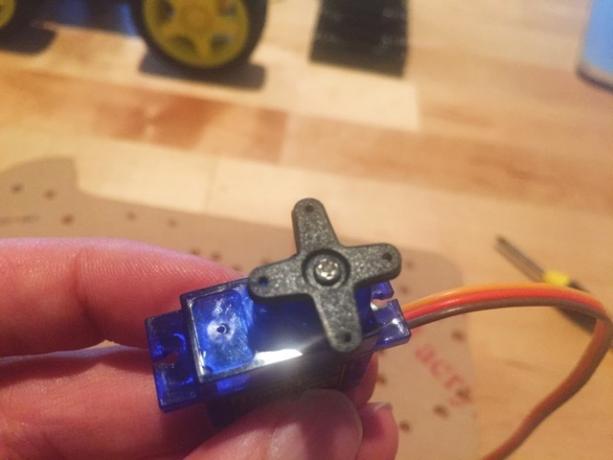
Kemudian balikkan servo ke bawah ke cincin plastik hitam dudukan. Pastikan kabel yang keluar dari servo menghadap ke arah yang sama dengan bagian yang lebih panjang dari dudukan (sekali lagi, lihat gambar di bawah), dan gunakan empat sekrup kecil untuk mengamankan palang (ada empat lubang di dudukan yang sejajar dengan lubang pada palang).

Ini seperti apa setelah terpasang:
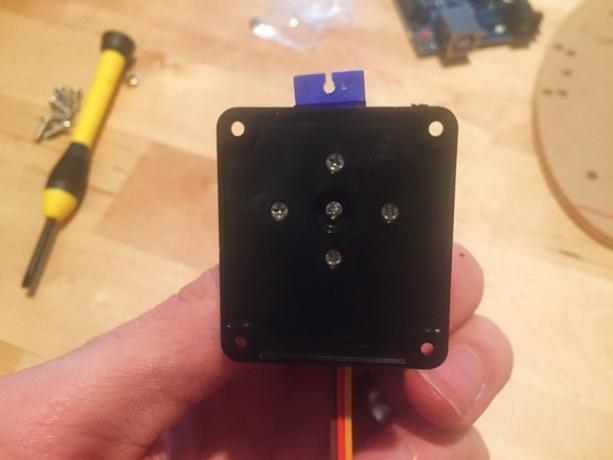
Akhirnya, ambil dua bagian lain dari servo holder dan pasang ke servo (ada lekukan di sisi potongan yang cocok dengan tab plastik pada servo).
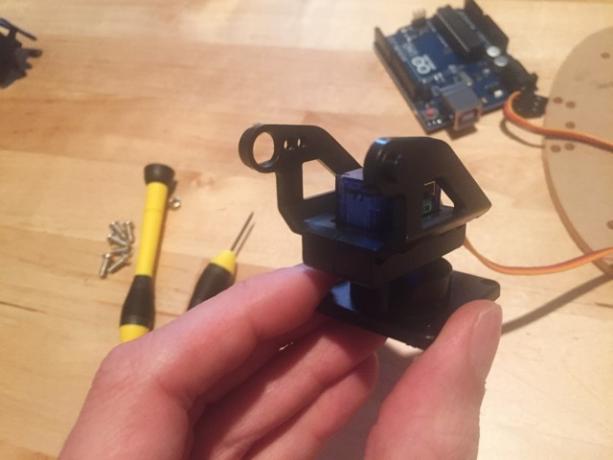
Sekarang setelah servo holder selesai, ia dapat dipasang ke sasis.
Di sinilah baut pergi:
Saatnya memberi mata pada robot kami. Pasang sensor ultrasonik ke pemegang servo menggunakan dua ikatan zip.

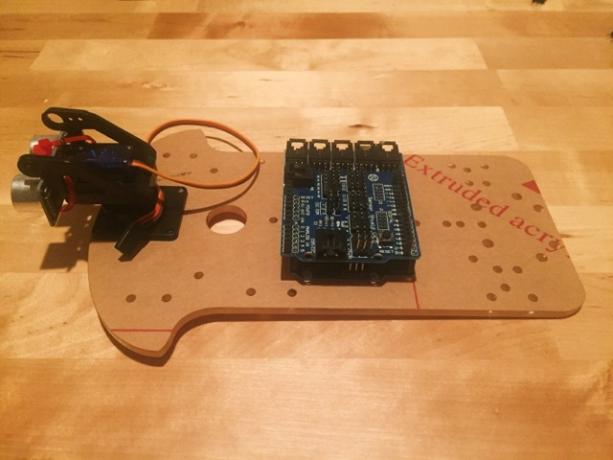
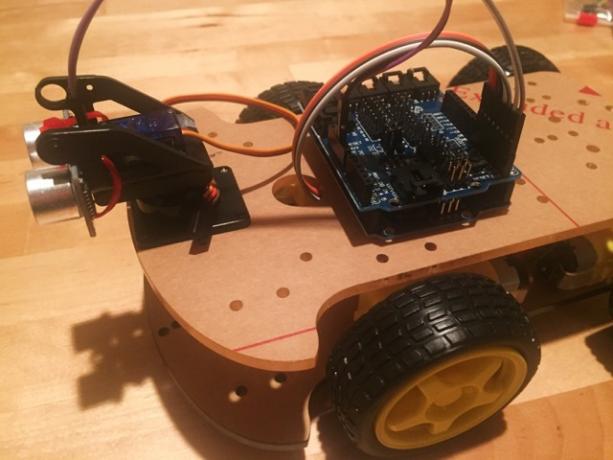
Jika Anda bekerja dari kit yang sama dengan saya, Anda akan menerima pelindung sensor Arduino. Kami tidak akan menggunakannya dalam versi ini, tetapi Anda bisa membuatnya di atas UNO sekarang jika Anda mau (seperti yang saya miliki pada gambar di bawah). Cukup luruskan pin di bagian bawah perisai dengan port I / O pada Arduino dan tekan ke bawah untuk menghubungkannya. Anda tidak membutuhkannya saat ini, tetapi perisai bisa berguna 4 Perisai Arduino Teratas Untuk Menguasai Proyek AndaAnda telah membeli starter kit Arduino, Anda telah mengikuti semua panduan dasar, tetapi sekarang Anda telah menemukan batu sandungan - Anda membutuhkan lebih banyak bit dan bobs untuk mewujudkan impian elektronik Anda. Untungnya, jika Anda memiliki ... Baca lebih banyak .
Apakah Anda menghubungkan pelindung sensor atau tidak, Anda sekarang akan membutuhkan empat kabel untuk menghubungkan sensor ultrasonik ke Arduino. Ada empat pin pada sensor, VCC, GND, TRIG, dan ECHO. Hubungkan VCC ke pin 5V pada Arduino, GND ke GND, dan TRIG dan ECHO ke pin I / O 12 dan 13.
Sekarang ambil bagian bawah sasis, dan sambungkan enam kabel jumper ke pin I / O dari jembatan H (mereka ditandai ENA, IN1, IN2, IN3, IN4, dan ENB). Perhatikan kabel warna mana yang terhubung ke port mana, yang perlu Anda ketahui nanti.

Sekarang saatnya untuk mulai menyatukan hal ini. Ambil bagian atas sasis dan letakkan di atas poros tembaga yang terhubung ke bagian bawah, dan tarik kabel yang terpasang ke jembatan H melalui lubang di tengah sasis. Hubungkan enam kabel ke port I / O sebagai berikut:
- ENA ke port I / O 11
- ENB ke port I / O 10
- A1 ke I / O port 5
- A2 ke I / O port 6
- B1 ke port I / O 4
- B2 ke I / O port 3
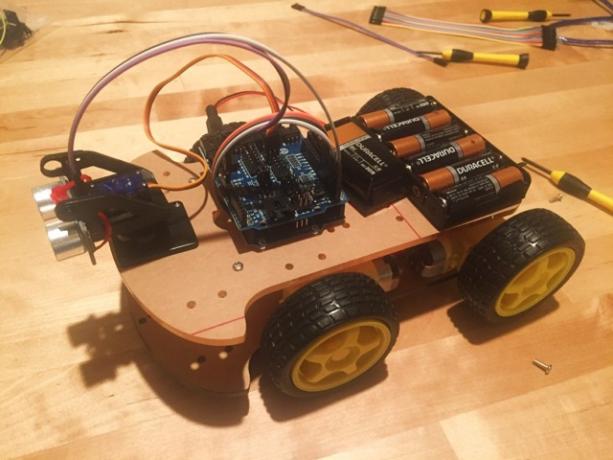
Sekarang, gunakan empat sekrup pendek untuk memasang bagian atas sasis ke poros tembaga. Atur dudukan baterai enam-AA di atas sasis (sekrupkan jika Anda bisa), pasang dudukan sel 9V ke Arduino, dan bot ini siap untuk bergoyang!
Yah, hampir siap untuk bergoyang. Belum memiliki kepribadian yang cukup.
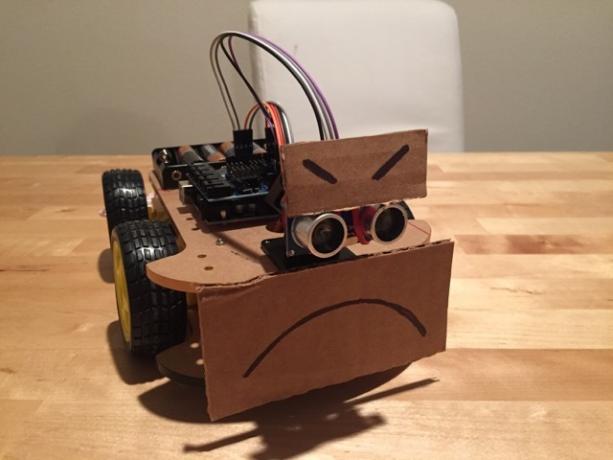
Itu dia. Sekarang beri otak. Mari kita lakukan pemrograman.
Hal pertama yang akan kita lakukan adalah menguji untuk memastikan bahwa jembatan dan motor terhubung dengan benar. Ini sketsa cepat yang akan memberi tahu bot untuk bergerak maju selama setengah detik, berkendara mundur selama setengah detik, lalu belok kiri dan kanan:
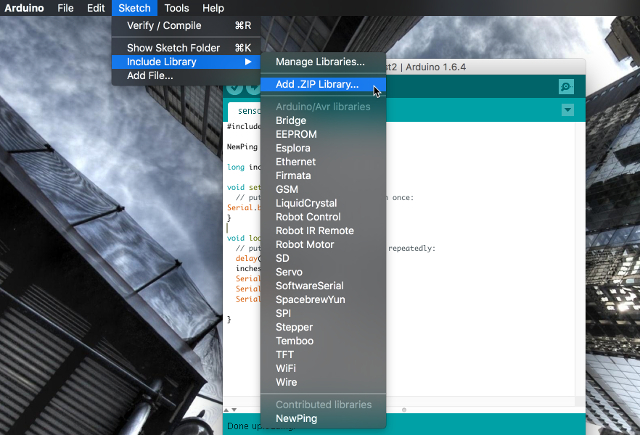
Itu banyak kode untuk pengujian sederhana, tetapi mendefinisikan semua fungsi itu membuatnya lebih mudah untuk di-tweak nanti. (Terima kasih banyak kepada Billwaa untuk itu posting blog tentang menggunakan jembatan-H untuk mendefinisikan fungsi-fungsi ini.) Jika terjadi kesalahan, periksa semua koneksi Anda dan bahwa kabel terhubung ke pin yang benar. Jika semuanya berfungsi, sekarang saatnya untuk beralih ke tes sensor. Untuk menggunakan sensor ultrasonik, Anda pasti mau unduh perpustakaan NewPing, lalu gunakan Sketsa> Sertakan Perpustakaan> Tambah .ZIP Library… untuk memuat perpustakaan.
Pastikan Anda melihat pernyataan sertakan di bagian atas sketsa Anda; jika tidak, tekan Sketsa> Sertakan Perpustakaan> NewPing. Setelah selesai, muat sketsa berikut:
Unggah sketsa, dan buka monitor serial menggunakan Alat> Monitor Seri. Anda akan melihat urutan angka yang diperbarui dengan cepat. Pegang tangan Anda di depan sensor dan lihat apakah angka itu berubah. Gerakkan tangan Anda masuk dan keluar, dan Anda harus mendapatkan pengukuran seberapa jauh tangan Anda dari sensor.
Jika semuanya bekerja dengan benar, saatnya untuk menyatukan semuanya dan membiarkannya berjalan! Ini kode untuk robot sekarang. Seperti yang mungkin Anda ketahui, ini pada dasarnya adalah dua sketsa uji yang disatukan dengan pernyataan jika ditambahkan untuk mengontrol perilaku robot. Kami telah memberinya perilaku penghindaran rintangan yang sangat sederhana: jika mendeteksi sesuatu yang jaraknya kurang dari empat inci, itu akan mencadangkan, belok kiri, dan mulai bergerak lagi. Ini video bot yang sedang beraksi.
Berikan Robot Anda Kehidupan
Setelah perilaku ini berfungsi dengan benar, Anda dapat menambahkan perilaku yang lebih rumit; buat robot bergantian antara belok kiri dan kanan, atau pilih secara acak; membunyikan bel jika mendekati sesuatu; hanya berbalik, bukannya mundur; Anda benar-benar hanya dibatasi oleh imajinasi Anda. Anda dapat menggunakan apa saja di blog Anda Kit starter Arduino Apa yang ada di Starter Kit Arduino Anda? [Pemula Arduino]Menghadapi kotak yang penuh dengan komponen elektronik, mudah kewalahan. Berikut ini panduan untuk apa yang akan Anda temukan di kit Anda. Baca lebih banyak untuk menambahkan lebih banyak fungsi. Anda juga akan melihat bahwa kami belum mengkodekan apa pun untuk servo: Anda sebenarnya dapat membuat "mata" robot Anda bergerak maju dan mundur. mungkin menggunakannya untuk mencari jalan, bukan hanya membackup setiap kali menemukan hambatan langsung di depan.
Beri tahu kami jika Anda memutuskan untuk membuat robot ini atau yang lain, dan beri tahu kami bagaimana Anda memutuskan untuk menyesuaikan perilaku atau tampilannya. Jika Anda memiliki pertanyaan tentang robot ini, poskan di komentar di bawah, dan saya akan melihat apakah saya dapat membantu!
Dann adalah strategi konten dan konsultan pemasaran yang membantu perusahaan menghasilkan permintaan dan arahan. Ia juga menulis blog tentang strategi dan pemasaran konten di dannalbright.com.


